금주에 해야 할 일
1.커서 이동
2.커서 FIRE키
i) 커서 위치에 무빙 오브젝이 있는가. 있으면 3번
ii) 커서 위치에 무빙 오브젝이 있는가. 없으면 대기
3.커서 위치에 있는 오브젝의 이동거리 화면에 표시(길찾기 알고리즘으로 갈수 없는곳은 제거후)
 invalid-file
invalid-file탄금 프로젝트에 AStar알고리즘을 적용 시킬려면 어떤게 필요할까?
 AStar알고리즘-탄금컨버팅.zip
AStar알고리즘-탄금컨버팅.zip1. SRPG라는 장르적 특성 상 기존 알고리즘의 이동형태를 바꿀 필요가 있다.
: 자신 타일을 기준으로 상하좌우 대각선을 포함해 8방향에 대한 적합성 검사를 한다. 이를 수정하여 상하좌우 즉 4방향에 대한 검사를 수행하도록 해야한다.
: 캐릭터가 이동 할 수 있는 영역은 자신의 이동거리를 나타내는 타일을 넘어갈 수 없으므로 이를 제한해야 한다. 최대 이동 거리를 제한 할 수 있는 방식에는 2가지가 있다. 길찾기가 완료된 GetBestNode()매서드를 통해서 최적화된 노드의 리스트를 얻어오는데. 얻어온 후 이동 시에 자신의 최대 이동거리와 비교하여 break; 시키는것과 노드 검색 시에 검색 범위를 최대 이동거리로 제한을 두는 것이다. 2번째 방법이 효율성 측면에서는 우수하나 AStar알고리즘의 특성 상 현재 찾고 있는 길의 적합도(f)값은 길찾기가 완료되지 않은 시점에서는 추측에 불과하기 때문에 무리가 있다.
2. 1번 문제가 해결됐다면 2번 문제를 들어가야 된다. 현재 검색하고자 하는 타일을 구성하는 작업이 필요하다.
: 타일의 사이즈를 구성하는데에는 3개의 define문이 사용되었다.
#define ASE_GRIDSIZE 8 // 타일 간격
#define ASE_BOARDX 100 // 검색하고자 하는 타일의 세로축
#define ASE_BOARDY 100 // 검색하고자 하는 타일의 가로축
.
.
UCHAR m_cBoard[ASE_BOARDX][ASE_BOARDY];
UCHAR m_cDataBoard[ASE_BOARDX][ASE_BOARDY];
위의 코드처럼 검색할 보드가 셋팅된다.
시각적인 보드로 판단되니 코드 분석을 더 합시다.
실마리를 풀었다. aseView.cpp의 MouseToPoint()매서드를 살펴보자.
이 매서드는 유저가 툴바에서 선택한 브러쉬로 해당 포인트를 설정하는 루틴이 들어있다.
1) 마우스의 포인터와 보드 정보를 얻어온다
int px = point.x/ASE_GRIDSIZE; // 마우스 좌표를 얻어온다.
int py = point.y/ASE_GRIDSIZE; // 마우스 좌표를 얻어온다.
UCHAR *board = GetDocument()->GetBoard(); // GetBoard()함수로 포인터를 얻어온다.
2) Start-End값을 셋팅한다.
else if (brush == 256)
{
temp.x = m_cStart.x * ASE_GRIDSIZE;
temp.y = m_cStart.y * ASE_GRIDSIZE;
UCHAR *board = GetDocument()->GetBoard();
if (board[ci(px,py)] == 0 || pDoc->AseMessage(ASE_VALID, px, py) == ASE_POSINVALID) return;
m_cStart.x = px;
m_cStart.y = py;
}
if (brush == 257)
{
temp.x = m_cEnd.x * ASE_GRIDSIZE;
temp.y = m_cEnd.y * ASE_GRIDSIZE;
UCHAR *board = GetDocument()->GetBoard();
if (board[ci(px,py)] == 0 || pDoc->AseMessage(ASE_VALID, px, py) == ASE_POSINVALID) return;
m_cEnd.x = px;
m_cEnd.y = py;
}
: 브러시 256은 start 257은 end를 나타내며 탄금 프로젝트 에서 start에는 캐릭터 자신의 위치를 넣고 end에는 공격할 대상의 위치를 넣으면 되겠다.
3) 장애물 값을 셋팅 한다. 장애물과 관련된 변수와 함수를 살펴보자.
var
m_iBreakData - int
m_cBreakpoint - CPoint
m_iBreakData - int
m_pcBreakNode - _asNode*
func
CPoint GetBreakpoint() { return m_cBreakpoint; }
void SetBreakpoint(CPoint bp) { m_cBreakpoint = bp; m_iBreakData = -1; }
void CAseDoc::NodeAdded(_asNode *node, int data)
{
if (m_cBreakpoint.x == -1 && m_iBreakData == -1) return;
if (node->x == m_cBreakpoint.x && node->y == m_cBreakpoint.y) {
m_bBreakpointHit = true;
m_pcBreakNode = node;
}
if (data == m_iBreakData) {
m_bBreakpointHit = true;
m_pcBreakNode = node;
}
}
위의 함수는 BreakPoint메뉴를 위해 존재하는 것이다.
다시 찾아보면 이동이 불가능한 타일은 ID_WEIGHTIMPASSABLE이라 명명되어 있고 m_uBrushType은 0으로 설정되어 있다.
결국 MouseToPoint매서드가 호출될 때 board의 특정 인덱스에 장애물을 나타내는 brush값인 0을 집어 넣음으로써 맵데이터가 채워지는 것이다.
// 뭐야 별거 아니잖아. 이것 때문에 4시간 동안 삽질 했다.
실질적으로 필요한 것만 간추리면 정말 간소한 AStar알고리즘이 완성되겠다.
//------------------------------------------------------------------------------
Q1-m_cDataBoard라는 멤버변수가 어디에 사용되는지는 이해가 않감.
A1-
Q2-캐릭터-캐릭터매니저-AI-FSM-AStar클래스간의 설계.
A2-
Q3-고정 장애물 말고 캐릭터를 장애물로 놓고 생각했을 시의 길찾기
A3-캐릭터 캐릭터 이동 턴이 종료된 시점에 해당 타일 정보 업데이트 시켜줌.
2007년 10월 24일 추가 작성
자료구조와 알고리즘 교수님께서 우리팀은 A*알고리즘을 프로젝트에 적용 시켰다고 이에 대한 발표준비를 하라고 하셨다. 그래서 샤샤삭 만들어 봤다. 실행파일과 스크린 샷 등을 포함 시켰다.
초보자를 위한 AStar 길찾기 알고리즘
'A* Pathfinding for Beginner By Patrick Lester’ <- 원래제목!
원문 http://www.gamedev.net/reference/programming/features/astar
2004. 4. 22
Translated By Generosus.
-------------------------------------------------------------------
영어가 딸려 번역하는데 무지 많은 시간이 소요되었으며, 영어식 표현으로 쓰기가 영 어색한 것은 한국식 표현으로 바꾸어 쓰기도 하였습니다. 영어실력이 쫌 되시는분은 좀더 자연스러운 번역으로 다시 올려주셔도 좋을 듯 합니다.
아참! 쓰다보니 반말 존댓말 마구 썩어 놓았는데 너그러이 용서하시길~
Cafe: http://cafe.naver.com/rosuslab.cafe
Email: debugman@hitel.net
-------------------------------------------------------------------
이분이 번역해 놓은 글을 제가 나름대로 좀더 읽기 쉽게 수정하였습니다.
제가 다시 번역한 것이 아니라, 이 분이 작성하신 글을 보며 공부하다 수정한 것이니 오해 없으시길 바랍니다.
제가 이해 한 것을 바탕으로 다시 써봤는데, 좀더 읽기 쉽게 수정되었길 바랍니다.
Cozy COZ . The Brainpower Season2
Blog: http://blog.naver.com/cos45.do
-------------------------------------------------------------------
여러분이 A*알고리즘을 쉽게 이해할때, 초보자들에게는 복잡하게 느껴질수도 있습니다
A*알고리즘을 해석한 글이 웹상에 많이 존재하지만 그것과 달리 이글은 진정한 초보자들을 위한 것입니다.
이 글은 A* 길찾기 알고리즘에 대해 완벽히 보여주도록 노력하지는 않습니다. 그보다 앞으로 여러분이 좀 더 구체적인 글을 읽고 이해하는데 필요한 A*길찾기 알고리즘의 원리와 기본적인 것들을 설명하고 있습니다. 나중에 여러분들이 읽을수 있도록 최고의 웹사이트 링크를 마지막 부분에 제공합니다.
마지막으로, 나는 이 논설의 마지막 부분에 C++과 Blitz Basic 두가지 버전의 샘플프로그램 패키지의 링크를 넣어 놓았지만 여러분은 어떤 컴퓨터 언어로든 A*알고리즘을 적용하는 것이 가능할 것입니다.
샘플프로그램에는 여러분이 A*가 동작하는 것을 볼수있도록 실행파일도 포함시켜 놓았습니다.
시작합시다
도입: 범위 찾기(The Search Area)
누군가가 A지점에서 B지점으로 가기를 원한다고 가정합시다. 그리고 아래그림처럼 벽이 이 두 지점을 분리시켜놓고 있습니다.
녹색은 출발지점A, 빨간색은 도착지점B, 그리고 파란색으로 채워진 사각형은 양쪽사이에 있는 벽입니다.
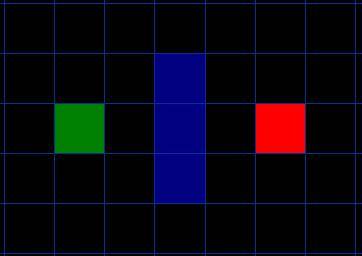
먼저 알수 있는 것은 검색지역이 사각형 격자들(Grid)로 나누어져 있다는 것인데, 우리는 이 단순화된 검색지역 사용합니다. 우리가 첫 단계로 할 것은 길 찾기입니다.
격자들로 지역을 단순화시킨 이런 방법은 우리의 검색지역을 단순한 2차원배열로 만들어줍니다.
각각의 아이템(시작지점,도착지점,벽,길 등등)은 사각형 격자위에 하나의 2차원배열로 묘사되는데, ‘갈수 있는곳’, ‘갈수없는곳‘ 이런식으로 상태가 기록됩니다.
우리가 A에서 B로 갈 수 있는 길은 어떠한 사각형들의 모양으로 나타나게 되는데, 사각형의 중앙에서 다음 사각형의 중앙으로의 이동을 목표에 도착할때까지 반복하면 길이 찾아지는 거죠.
이 중심점들을 노드 라고 부릅니다.
(검색지역을 사각형 뿐만 아니라 육각형, 직사각형등의 다른 모양으로 할 수 도 있습니다만 우리는 사각형 방식을 사용할 것입니다. 가장 단순하므로..)
다음의 순서로 길 찾기를 합니다.
1. 지점A로부터 검색 된 사각형을 열린목록(open list)에 추가합니다. 열린목록은 쇼핑목록과 비슷한데, 지금은 목록상에 아이템이 하나지만 나중에 좀더 갖게 될 것입니다.
2. 시작점 근처에 붙어있고 지나갈 수 있는 모든 사각형들을 봅시다. (벽, 물 또는 다른 잘못된 지역들은 무시합니다.) 그리고 그 지나갈 수 있는 사각형들을 열린목록에 추가합니다. 추가된 각각의 사각형들에게 지점A를 부모사각형이라고 저장합니다 (이 ‘부모사각형’은 우리가 길을 거슬러 올라갈 때 중요합니다. 후에 이것에 대해 확실하게 알게 될 것입니다.)
3. 시작점A(녹색사각형)를 열린목록에서 빼고, 다시는 볼 필요가 없는 사각형들의 목록인 닫힌목록(closed list)에 추가합니다.
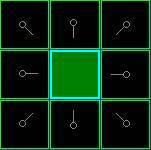
여기서, 여러분은 다음과 같은 그림을 얻을수 있습니다. 이 그림에서 중심에 어두운 녹색 사각형은 출발사각형(시작점A)입니다. 이것은 하늘색 외곽선으로 되어있고, 닫힌목록에 추가되었음을 의미합니다. 그리고 인접한 모든 사각형들은 검색된 후 열린목록에 들어갑니다.
(이것들은 녹색 외곽선으로 되어있고 부모사각형인 시작점을 가리키고 있는 회색의 포인터를 가지고 있습니다)
다음으로, 우리는 열린목록에 있는 인접한 사각형중에 하나를 선택하고 앞에서 했던 처리를 아래에 설명된 방법으로 반복하게 됩니다. 좀더 많이 할 수도 있고 덜 할 수도 있겠죠.
그런데 어떤 사각형을 선택해야 할까요? 그건바로 가장 작은 F비용을 가진 것을 선택하는 것입니다.
(F비용에 관해서는 바로 밑에 나옵니다)
길 기록(Path Scoring)
다음 방정식으로 사각형을 선택합니다.
F = G + H
G = 출발점 A(녹색지점)로부터 새로운 사각형까지의 이동비용입니다. 길을 찾아갈 수록 G의 값은 커지겠죠.(A로부터 멀어지므로..)
H = 얻어진 사각형으로부터 최종목적지점 B(빨간지점)까지의 예상이동비용입니다.
(이 값은 모든 장애물에 대해서는 고려하지 않고 현재 사각형에서 목적지점까지의 거기를 계산하는데 이때 대각선이동이 아닌 가로세로이동에 대한 비용으로 계산하는 것입니다. 장애물을 고려하지 않았으므로 이 비용이 최종이동비용과 같지 않을 확률이 크겠죠.)
우리가 찾고자 하는 길은 열린목록과 F비용이 작은 사각형을 선택하는것의 반복을 통해서 얻어집다.
위에 설명된 것처럼, G는 출발점으로부터 하나씩 얻게 되는 사각형으로 이동하는데 드는 이동비용이죠. 이 예제에서 우리는 세로 또는 가로로 이동하는데 각각 10의 비용, 대각선이동에 대해서는 14의 비용을 할당 할 것입니다.
(정사각형이고 가로세로가 10이면 대각선의 길이는 이등변삼각형 길이비 루트2:1:1에 의해 루트2 *10 : 10 : 10이 되므로(루트2는 약1.414) 14의 값이 나옵니다)
컴퓨터에서 숫자를 사용하는 것은 그만큼 빠르기 때문인데 단순화 시킨 숫자를 사용하지 않으면 길찾기가 매우 느려진다는 것을 알게 될 것입니다.
사각형의 G비용을 알아내는 방법은 그 부모로부터 G비용을 얻어와서 부모로부터 직각으로 움직였냐 대각선으로 움직였냐에 따라서 10또는 14를 추가해 주면 되는 것이죠.
H비용은 그 사각형 위치의 변화에 따라 예측될 수 있습니다.
(우리가 사용하는 이 방법을 맨하탄방식(Manhattan method)이라고 부릅니다.)
여러분은 현재사각형에서 목표사각형에 도달하기 까지의 대각선이동을 제외한 가로,세로로 이동한 총숫자를 계산할수 있고 거기에 10을 곱합니다. 이것이 바로 맨하탄방식인데 도시의 한쪽에서 다른 한쪽까지의 블록을 계산하는것과 같은 방식이기 때문에 명명 됐습니다. 여기서 여러분은 대각선으로 블록을 가로지를 수는 없겠죠. 위에서 말씀드렸듯이, H비용을 계산할 때 우리는 어떤 방해물도 무시합니다. 이 방식은 발견적방식이라고도 불리는데, 좀더 알기를 원하는 분은 여기(http://www.policyalmanac.org/games/heuristics.htm)에서 발견할수 있을 것입니다.
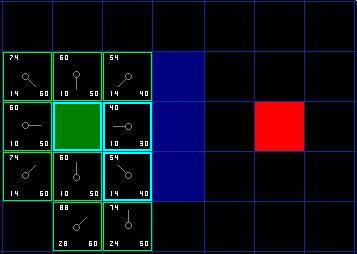
G와 H를 더하므로써 F 가 계산됩니다.우리가 진행한 검색의 첫단계 결과를 아래 그림에서 볼수있습니다. F,G,H 비용이 각각의 사각형에 표시되어 있는데, 시작점 우측에 있는 사각형안에 표시된것처럼, F는 좌상단에, G는 좌하단에, 그리고 H는 우하단에 표시됩니다.
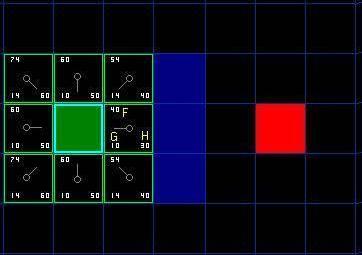
녹색사각의 우측 사각형을 보면, F = G+H (40 = 10+30) 이죠. 이사각형은 부모사각형이 시작점이 됩니다. (그렇죠? 바로 아랫단계로 물려받았으니까요. 한번씩 사각형들이 퍼질때마다 자식들이 탄생한다고 보시면 되겠죠.)
G는 시작점과 새로운 사각형의 거리라고 했으니 10이죠. (한변은 10)
H는 장애물을 무시하고 가로세로 이동으로 목적지(빨간사각형)까지의 이동비용이므로 가로 3번*10
이므로 30이죠. (G값이 14인 사각형들은 대각선 이동을 했기 때문인거 아시죠?)
이제 G, H값을 토대로 F값을 구하는 것이죠.
찾기 계속하기(Continuing the Search)
계속해서 검색을 해 나가기위해 우리는 단순히 열린목록에 있는 사각형들 중에서 가장 작은 F비용을 가지고 있는 사각형을 선택하고 그 선택된 사각형으로 다음의 과정을 진행하면 됩니다.
4. 선택된 사각형을 열린목록에서 빼고 단힌목록에 추가합니다.
(부모가 되서 자식만들 준비가 된거죠.)
5. 인접한 모든 사각형을 검색해서 닫힌목록에 있거나 갈수없는것(벽,물,그밖에 장애물)들을 제외한 나머지 중에서 열린목록에 없는 사각형을 열린목록에 추가합니다.
선택되었던 사각형을 열린목록에 추가된 새로운 사각형들의 부모로 만듭니다.
(선택되었던 사각형이란 4번에서 단힌목록에 추가된 그 사각형을 말합니다.
새로운 사각형이란 5번에서 열린목록에 새롭게 추가된 사각형을 말하구요.)
6. 만약 인접한 사각형중에 이미 열린목록에 있는 사각형이 있다면 이사각형으로 가는길이 더 좋은 길인지 확인하세요. 다시 말하면, 현재 선택된 사각형보다 G비용이 더 작은지를 검사하라는 것입니다. 만약 아니라면 아무것도 할 필요가 없지만 G비용이 더 작다면 선택되었던 사각형의 인접사각형들의 부모를 새로운 사각형으로 바꾸세요
(위쪽 그림에서 보면, 선택된 사각형으로 향하는 포인터들의 방향을 바꾸는 것을 말합니다.) 마지막으로, 그 사각형의 F와 G를 다시 계산합니다.)
이제 이작업들을 직접 해봅시다.
최초에 9개의 사각형중에 우리는 시작사각형을 닫힌목록에 넣은후 열린목록에 8개의 사각형을 가지고 있었습니다. 이들중 F비용이 가장작은 것은 시작사각형에 오른쪽에 있는 사각형 입니다. 이 사각형은 다음 그림에서 하늘색 외곽선으로 표시되어 있습니다.
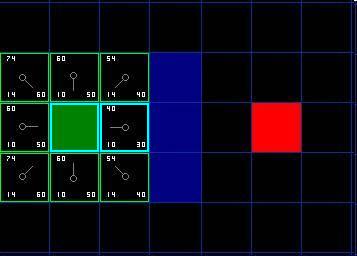
제일 먼저 , 이 사각형을 열린목록에서 빼고 닫힌목록에 넣습니다. 그리고 우리는 인접한 사각형들을 검색하게 되는데, 그 오른쪽에 있는 사각형은 벽이죠. 그래서 무시하고, 왼쪽에 있는 것은 시작점이고 이것은 닫힌목록에 있으므로 이것역시 무시합니다.
장애물 4개와 시작점을 제외하니 4개의 사각형이 남는데 이 사각형들은 이미 열린목록에 있습니다. 그래서 우리는 그것들을 이용한 길 중에 현재 이 사각형을 이용하는 것 보다 좋은 것이 있는지 G비용을 검색합니다. 녹색사각형의 우상단의 사각형을 봅시다. 이것의 G비용은 14인데, 만약 우리가 현재 선택된 사각형( 녹색점의 우측사각형)을 거쳐서 그곳으로 이동한다고 하면 G비용은 20일 것입니다(현재사각형이 G비용이 10이고 이것에서 수직으로 위쪽으로 한번 이동하였으므로 10을 더합니다.). G비용 20은 14보다 크므로 좋은 길이 아니죠.
가로세로 움직이는 것 보다 대각선으로 한번 움직이는게 비용이 적게 들죠 ( 20 : 14)
현재 열린목록에 있는 사각형은 7개입니다. (위 그림에서 녹색 외곽선인 사각형) 그중에 가장 작은 F비용을 가지고 있는 것을 하나 고르세요. 흥미롭게도 이 경우엔 두개의 사각형이 54의 F비용을 가지고 있죠. 어떤 것을 사용할지는 중요한 문제가 아닙니다. 속도상의 목적으로는 둘중 열린목록에 더 늦게 추가된 것을 선택하는 것이 빠르겠죠
(각각 다른 두개의 A* 버전을 만들더라도 길이가 같은 각각 두개의 길을 찾게 될 것이기 때문에 F점수가 둘 다 같더라도 서로 다르게 처리해도 상관없습니다.)
그래서, 우리는 그냥 아래쪽에 있는 것을 선택합니다.
새로운 사각형이 선택되었으니 다시 인접한 사각형들을 검색 해야겠죠.여기서 우리는 바로 오른쪽에 사각형이 벽이라는 것을 발견하게 됩니다. (무시) 그 바로위도 똑같이 벽이기 때문에 이것도 역시 무시합니다. 그리고 벽 바로 아래 사각형(마지막 장애물의 아래 사각형)도 무시해야 합니다. 왜그럴까요? 사각형 자체가 움직인다고 생각하세요. 현재 선택된 사각형이 오른쪽 아래로 대각선 이동한다면 마지막 장애물의 대각선절반을 잘라야 이동이 가능하겠죠? 그러므로 마지막장애물의 아래사각형도 현재 검색에서 제외시키는 것입니다.
여러분은 일단 밑으로 내려가서 그다음 그사각형을 거쳐서 지나가야 합니다.
(이건 말그대로 어떻게 정의하느냐에 따라 틀린건데, 개발자 마음이겠죠. 여기선 그렇게 적용하도록 합니다)
이렇게 5개의 사각형이 검색대상에서 빠집니다. 현재사각형 아래에 있는 2개의 사각형은 열린목록에 없는것이므로 추가시킵니다. 그리고 현재 사각형은 이것들의 부모가 되겠죠?
그리고 바로 왼쪽에 있는 마지막 사각형은 현재사각형을 통해서 가는것보다 G비용이 적은지 검사를 해보면 아니라는 걸 알 수 있습니다.
우리는 목표사각형을 열린목록에 추가 할때까지 이 처리를 계속 반복합니다. 계속된 검색의 결과는 아래그림입니다.
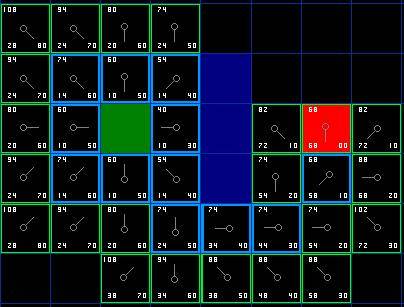
시작점 밑으로 2번째 사각형의 부모사각형이 이전 그림과 변경되었다는 것을 주목하세요.
전에 이것은 G비용이 28이었고 오른쪽위에 사각형을 가리키고 있었습니다. 지금은 G비용은 20이고 위쪽 사각형을 가리키고 있는데, 이 일은 우리가 길찾기를 처리해 나가면서 어디선가에서 일어난 것입니다. 어딘가에서 G비용을 검사했고 여기서 더 비용이 적게드는 길을 찾아냈습니다. 그러므로써 부모가 바뀌것이고 G, F비용이 다시 계산되어진것이죠.
이런 식으로 목표지점으로 가는 가장 좋은 길을 찾아 검색을 하면서 바뀔 수 있는 사각형의 비용을 바꿔가면서 길을 찾을 것입니다.
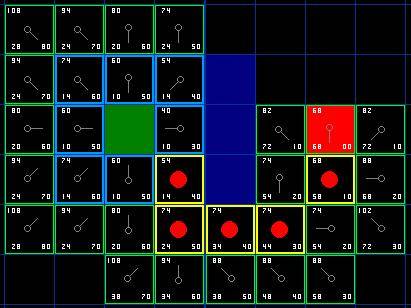
최종적인 진짜 길은 빨간지점(목표지점)에서 부모사각형을 찾아가며 거꾸로 되짚어가면서 녹색지점(시작지점)까지 가면 됩니다. 이것이 가장 좋은 길입니다.
이것은 다음의 그림에서 볼수있습니다.
시작지점 A에서 목표지점 B까지 이동하는 것은 단순히 길을 따라있는 각각의 사각형의 중심(노드)에서 다음사각형의 중심으로 이동하면 되는 것입니다.
마지막으로 위에서 설명한 A* 방식을 여기에서 정리해봅시다.
1. 시작사각형에서 검색된 인접사각형들을 열린목록에 넣습니다.
2. 다음의 과정들을 반복합니다.
a) 열린목록에서 가장 낮은 F 비용을 찾아 현재사각형으로 선택합니다.
b) 이것을 열린목록에서 꺼내 닫힌목록으로 넣습니다.
c) 현재 사각형에 인접한 8 개의 사각형에 대해?
● 만약 인접한사각형이 갈수없는 것 이거나 그것이 닫힌목록상에 있다면 무시, 그렇지 않은것은 다음을 계속합니다.
● 만약 이것이 열린목록에 있지 않다면, 이것을 열린목록에 추가하고. 이 사각형의 부모를 현재 사각형으로 만듭니다. 사각형의 F,G,H 비용을 기록.
● 만약 이것이 이미 열린목록에 있다면, G비용을 이용하여 이 사각형이 더 나은가 알아보고, 그것의 G비용이 더 작으면 그것이 더 나은 길이라는 것을 의미하므로 부모 사각형을 그 (G비용이 더 작은)사각형으로 바꿉니다, 그리고 그 사각형의 G,F비용을 다시 계산합니다. 만약 여러분의 열린목록을 F비용으로 정렬하고 있다면 바뀐것에 따라서 열린목록을 다시 정렬해야합니다.
d) 그만해야 할 때
● 길을 찾는 중 목표사각형을 열린목록에 추가하였을때,
● 열린목록이 비어있게 될 경우.
(이때는 목표사각형을 찾는데 실패한것인데 이 경우 길이 없는경우입니다.)
3. 길 저장하기.
목표사각형으로부터 각각의 사각형의 부모사각형을 향하여 시작사각형에 도착할때까지 거슬러 올라갑니다. 이것이 여러분이 찾는 길입니다.
[출처] 초보자를 위한 A* 알고리즘 (기초개념 설명 및 소스)|작성자 코즈